Chenghao Xu
PhD Candidate | EPFL

"Anything one man can imagine, other men can make real." -Jules Verne
I am currently pursuing my Ph.D. superivsed by Prof. Olga Fink at École Polytechnique Fédérale de Lausanne (EPFL), Switzerland, and closely collaborating with Schindler. Before this, I completed my M.Sc. in Robotics at the Delft University of Technology (TU Delft), Netherlands, and a B.Eng. in Mechanical Engineering with distinction from the Southern University of Science and Technology, China.
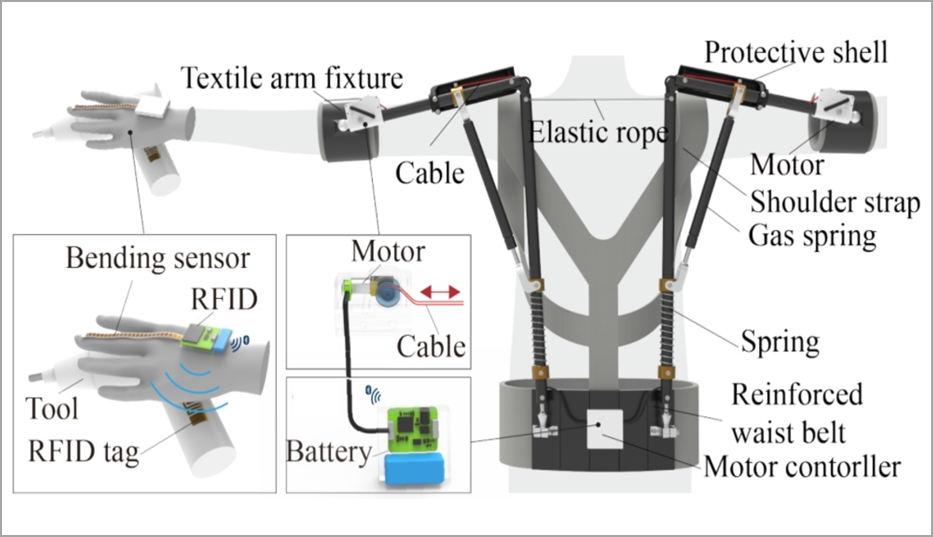
During my master’s studies, I worked on robust dynamic visual SLAM systems and realistic dynamic environment simulations with Prof. Aamir Ahmad at the Max Planck Institute for Intelligent Systems (MPI-IS), Tübingen, Germany. In my undergraduate years, I conducted research on passive assistive exoskeletons and developed a functional prototype with Prof. Hongqiang Wang. I also collaborated with Prof. Jianwen Luo, focusing on the mechanical design of quadruped robots.
Inspired by the fantasies of Jules Verne and Isaac Asimov, I am captivated by the elegance of intelligent systems, which propels me to explore the intersections between the physical world and artificial intelligence. My current research interests lie in 3D vision and scene reconstruction, particularly in multimodal reconstruction for building assessment and renovation.
News
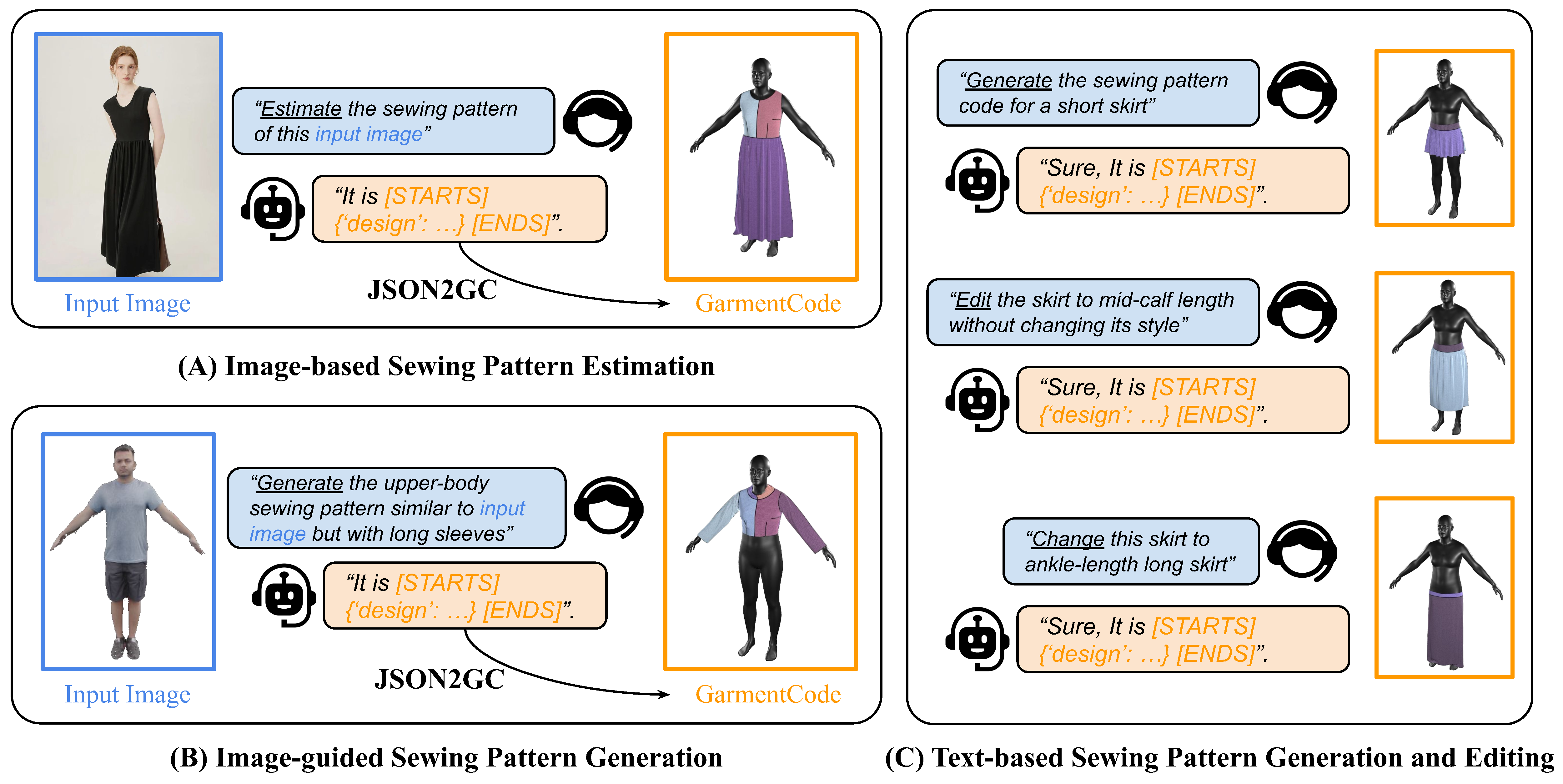
| Feb 26, 2025 | ChatGarment is accetped to CVPR 2025! |
|---|---|
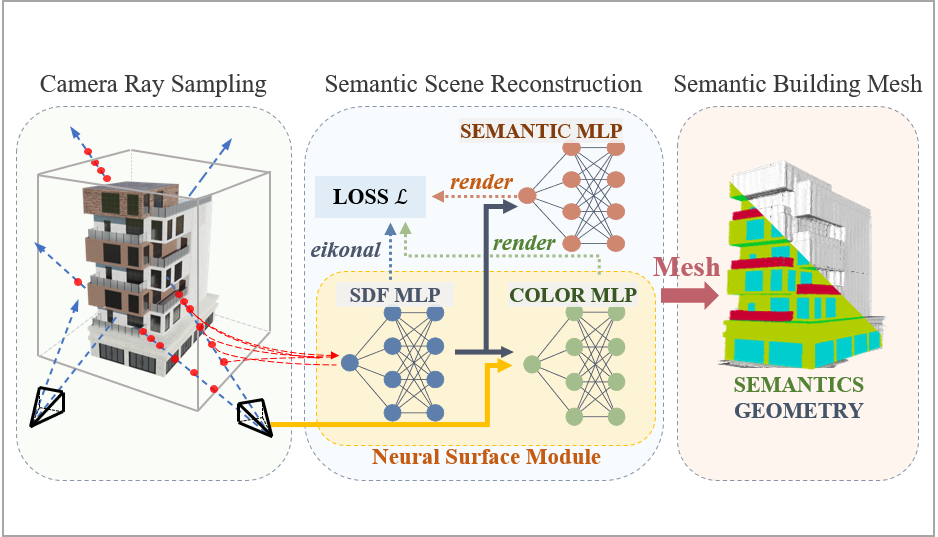
| Feb 13, 2025 | BuildNet3D has been accepted by Building and Environment Journal. |
| Dec 06, 2024 | Excited to present BuildNet3D at FoC 2024 and AMLD 2025. |
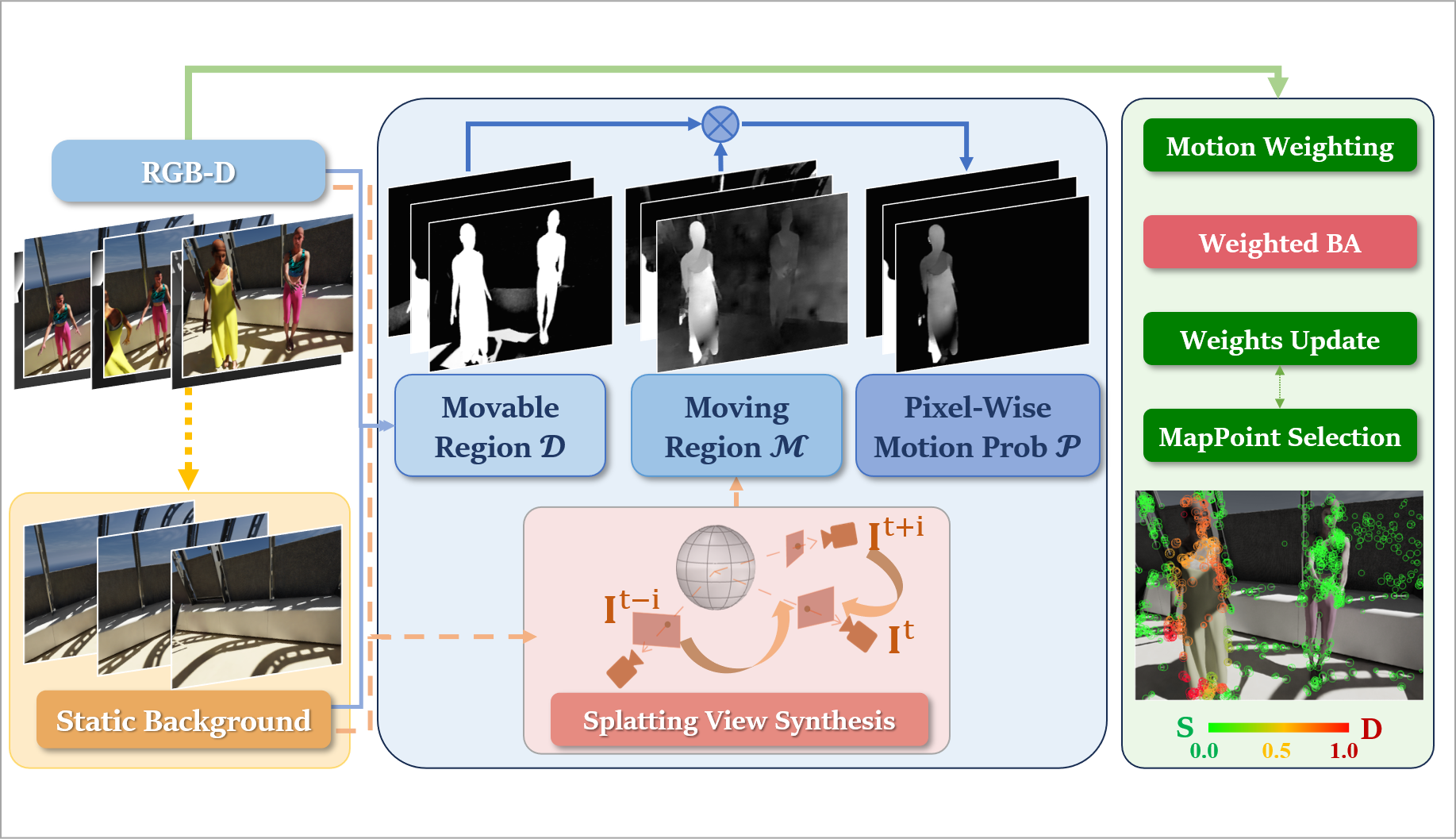
| Aug 08, 2024 | My first paper DynaPix SLAM is accepted to DAGM GCPR 2024! |
| Jun 24, 2024 | Our research on upper limb exoskeleton has been accepted by TMECH. |
| Apr 20, 2024 | I’m thrilled to attend the ETH Robotics Summer School this summer! |
| May 07, 2023 | Our work got accepted to ICRA 2023 Workshop on Active Methods in Autonomous Navigation. |
| May 06, 2023 | Our work got accepted to ICRA 2023 Workshop on Pretraining for Robotics. |
| Dec 31, 2022 | GRADE was accepted for presentation at NVIDIA GTC 2023. |
| Jun 30, 2022 | I will work as a research assistant at MPI-IS this summer. |
| Feb 10, 2022 | I will work on novel and impactful solutions with Spot robots in YES! Delft Impact Lab 🐕 |
| Feb 01, 2022 | I am currently working as a Computer Vision R&D Engineer at Lely Technologies 🐄 |
| Jul 01, 2021 | First time in Beijing: I will work as a control engineer at ROKAE Robotics. |
| Aug 25, 2020 | Admission to Master Robotics at Delft University of Technology 🏰 |
| Jun 30, 2020 | I graduated from Southern University of Science and Technolgy with Excellent Graduate Honor! |
Selected Publications

Featured Projects
.js-id-FeaturedGenerating Realistic Animated Dynamic Environments
Lightweight Adaptive Upper-Limb Exoskeleton
Multi-Camera Real-Time Surveillance Video Stitching
Online Trajectory Planning for Manipulators based on Discrete-Time Double S Profile
TIAGo Robot for Expiring Items Picking in Retail Environment

Machine Learning for Car Racing Games
Obstacle Detection and Avoidance for Autonomous Vehicle
Path Planner for Quadrotor based on Kinodynamics RRT* and k-PRM Methods
